A Bio-Inspired Event-Driven Mechanoluminescent Visuotactile Sensor for Intelligent Interactions
Abstract
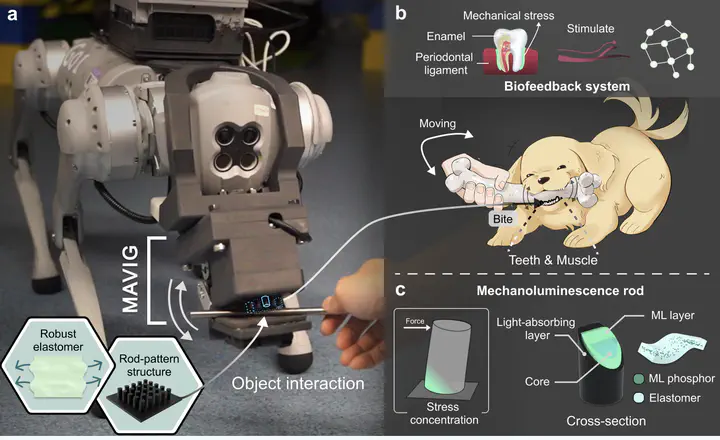
Event-driven sensors are essential for real-time applications, yet the integration of current technologies faces limitations such as high cost, complex signal processing, and vulnerability to noise. This work introduces a bio-inspired mechanoluminescence visuotactile sensor that enables standard frame-based cameras to perform event-driven sensing by emitting light only under mechanical stress, effectively acting as an event trigger. Drawing inspiration from the biomechanics of canine teeth, the sensor utilizes a rod-patterned array to enhance mechanoluminescent signal sensitivity and expand the contact surface area. In addition, a machine learning-enabled algorithm is designed to accurately analyze the interaction-triggered mechanoluminescence signal in real-time. The sensor is integrated into a quadruped robot’s mouth interface, demonstrating enhanced interactive capabilities. The system successfully classifies eight interactive activities with an average accuracy of 92.68%. Comprehensive tests validate the sensor’s efficacy in capturing dynamic tactile signals and broadening the application scope of robots in interaction with the environment.
Zihan Wang
Postdoctoral Scholar
My research interests include sensing systems and data solutions for embodied AI. Welcome to contact me.
{kind=link}