STEV: Stretchable Triboelectric E-skin enabled Proprioceptive Vibration Sensing for Soft Robot
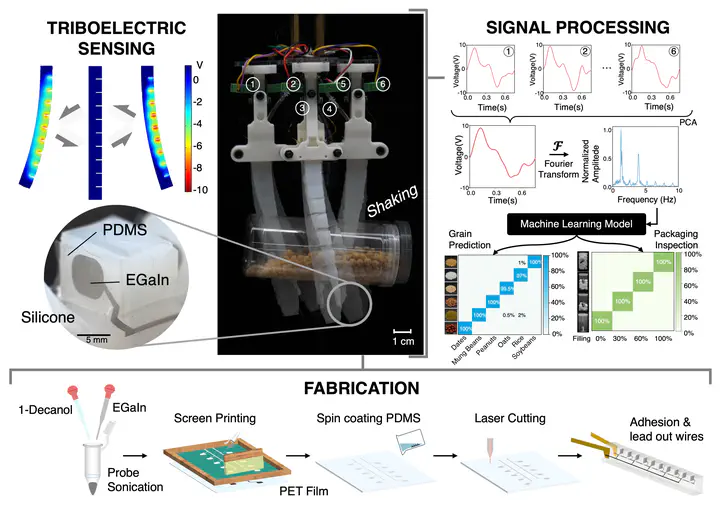 Image credit: IEEE
Image credit: IEEEAbstract
Vibration perception is essential for robotic sens- ing and dynamic control. Nevertheless, due to the rigorous demand for sensor conformability and stretchability, enabling soft robots with proprioceptive vibration sensing remains challenging. This paper proposes a novel liquid metal-based stretchable e-skin via a kirigami-inspired design to enable soft robot proprioceptive vibration sensing. The e-skin is fabricated into 0.1mm ultrathin thickness, ensuring its negligible influence on the overall stiffness of the soft robot. Moreover, the working mechanism of the e-skin is based on the ubiquitous triboelec- trification effect, which transduces mechanical stimuli without external power supply. To demonstrate the practicability of the e-skin, we built a soft gripper consisting of three soft robotic fingers with proprioceptive vibration sensing. Our experiment shows that the gripper can accurately distinguish the grain category (six grains with the same mass, 99.9% accuracy) and the packaging quality (100% accuracy) by simply shaking the gripped bottle. In summary, a soft robotic proprioceptive vibration sensing solution is proposed; it helps soft robots to have a more comprehensive awareness of their self-state and may inspire further research on soft robotics.
Zihan Wang
Postdoctoral Scholar
My research interests include sensing systems and data solutions for embodied AI. Welcome to contact me.
{kind=link}